






ಐದು-ಅಕ್ಷದ ಲಂಬ ಯಂತ್ರ ಕೇಂದ್ರ CV ಸರಣಿ











ವೈಶಿಷ್ಟ್ಯಗಳು
ಯಂತ್ರ ಪರಿಚಯ
ಐದು-ಅಕ್ಷದ ಲಂಬವಾದ ಯಂತ್ರ ಕೇಂದ್ರದ CV ಸರಣಿಯು ಹೆಚ್ಚಿನ ಬಿಗಿತ, ಹೆಚ್ಚಿನ ನಿಖರತೆ ಮತ್ತು ಹೆಚ್ಚಿನ ದಕ್ಷತೆಯ ಯಂತ್ರದ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹೊಂದಿದೆ. ಕಾಲಮ್ ಒಂದು ದೊಡ್ಡ ಸ್ಪ್ಯಾನ್ನೊಂದಿಗೆ ಹೆರಿಂಗ್ಬೋನ್ ವಿನ್ಯಾಸವನ್ನು ಅಳವಡಿಸಿಕೊಳ್ಳುತ್ತದೆ, ಇದು ಕಾಲಮ್ನ ಬಾಗುವಿಕೆ ಮತ್ತು ತಿರುಚುವ ಶಕ್ತಿಯನ್ನು ಹೆಚ್ಚು ಹೆಚ್ಚಿಸುತ್ತದೆ; ವರ್ಕ್ಬೆಂಚ್ ಸಮಂಜಸವಾದ ಸ್ಲೈಡರ್ ಸ್ಪ್ಯಾನ್ ಅನ್ನು ಅಳವಡಿಸಿಕೊಳ್ಳುತ್ತದೆ ಮತ್ತು ಮೇಲ್ಮೈಯನ್ನು ತಣಿಸುತ್ತದೆ, ಇದರಿಂದಾಗಿ ವರ್ಕ್ಬೆಂಚ್ನಲ್ಲಿನ ಬಲವು ಏಕರೂಪವಾಗಿರುತ್ತದೆ ಮತ್ತು ಗಡಸುತನವನ್ನು ಸುಧಾರಿಸುತ್ತದೆ; ಹಾಸಿಗೆಯು ಟ್ರಾಪಜೋಡಲ್ ಅಡ್ಡ-ವಿಭಾಗವನ್ನು ಅಳವಡಿಸಿಕೊಳ್ಳುತ್ತದೆ, ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಕೇಂದ್ರವು ತಿರುಚುವ ಶಕ್ತಿಯನ್ನು ಸುಧಾರಿಸುತ್ತದೆ; ಅತ್ಯುತ್ತಮ ಒಟ್ಟಾರೆ ಸ್ಥಿರತೆಯನ್ನು ಒದಗಿಸಲು ಪ್ರತಿಯೊಂದು ಘಟಕವನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸಲು ಇಡೀ ಯಂತ್ರವು ಸೀಮಿತ ಅಂಶ ವಿಶ್ಲೇಷಣೆಯನ್ನು ಬಳಸುತ್ತದೆ.
ವೇಗವಾದ ಮೂರು-ಅಕ್ಷದ ಕ್ಷಿಪ್ರ ಸ್ಥಳಾಂತರವು 48M/min ತಲುಪಬಹುದು, TT ಪರಿಕರ ಬದಲಾವಣೆಯ ಸಮಯವು ಕೇವಲ 2.5S ಆಗಿದೆ, ಟೂಲ್ ಮ್ಯಾಗಜೀನ್ ಅನ್ನು 24t ಗೆ ಸಂಪೂರ್ಣವಾಗಿ ಲೋಡ್ ಮಾಡಲಾಗಿದೆ. ಸಂಕೀರ್ಣ ಆಕಾರಗಳು ಮತ್ತು ಸಂಕೀರ್ಣ ಕುಳಿಗಳು ಮತ್ತು ಮೇಲ್ಮೈಗಳೊಂದಿಗೆ ವಿವಿಧ 2D ಮತ್ತು 3D ಕಾನ್ವೆಕ್ಸ್-ಪೀನ ಮಾದರಿಗಳಿಗೆ ಇದು ಸೂಕ್ತವಾಗಿದೆ. ಇದು ಮಿಲ್ಲಿಂಗ್, ಡ್ರಿಲ್ಲಿಂಗ್, ವಿಸ್ತರಿಸುವುದು, ಬೋರಿಂಗ್, ಟ್ಯಾಪಿಂಗ್ ಮತ್ತು ಇತರ ಸಂಸ್ಕರಣಾ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ ಸಹ ಸೂಕ್ತವಾಗಿದೆ, ಇದು ಬಹು-ವೈವಿಧ್ಯತೆಯ ಸಂಸ್ಕರಣೆ ಮತ್ತು ಉತ್ಪಾದನೆಯ ಸಣ್ಣ ಮತ್ತು ಮಧ್ಯಮ ಗಾತ್ರದ ಬ್ಯಾಚ್ಗಳಿಗೆ ಹೆಚ್ಚು ಸೂಕ್ತವಾಗಿದೆ ಮತ್ತು ಸಾಮೂಹಿಕ ಉತ್ಪಾದನೆಗೆ ಸ್ವಯಂಚಾಲಿತ ರೇಖೆಗಳಲ್ಲಿಯೂ ಸಹ ಬಳಸಬಹುದು.
ಟೂಲ್ ಟ್ರ್ಯಾಕ್ನ ಡೈನಾಮಿಕ್ ಗ್ರಾಫಿಕ್ ಪ್ರದರ್ಶನ, ಬುದ್ಧಿವಂತ ಎಚ್ಚರಿಕೆ ಪ್ರದರ್ಶನ, ಸ್ವಯಂ-ರೋಗನಿರ್ಣಯ ಮತ್ತು ಇತರ ಕಾರ್ಯಗಳು ಯಂತ್ರ ಉಪಕರಣದ ಬಳಕೆ ಮತ್ತು ನಿರ್ವಹಣೆಯನ್ನು ಹೆಚ್ಚು ಅನುಕೂಲಕರ ಮತ್ತು ವೇಗವಾಗಿ ಮಾಡುತ್ತದೆ; ಓದುವ ಸಾಮರ್ಥ್ಯವನ್ನು 3000 ಸಾಲುಗಳು/ಸೆಕೆಂಡಿಗೆ ಹೆಚ್ಚಿಸಲಾಗಿದೆ, ಇದು ದೊಡ್ಡ ಸಾಮರ್ಥ್ಯದ ಕಾರ್ಯಕ್ರಮಗಳ ವೇಗದ ಮತ್ತು ಪರಿಣಾಮಕಾರಿ ಪ್ರಸರಣ ಮತ್ತು ಆನ್ಲೈನ್ ಪ್ರಕ್ರಿಯೆಗೆ ಅನುಕೂಲವಾಗುತ್ತದೆ.
ಐದು-ಅಕ್ಷದ ಯಂತ್ರ ಕೇಂದ್ರದ RTCP (ತಿರುಗುವಿಕೆ ಟೂಲ್ ಸೆಂಟರ್ ಪಾಯಿಂಟ್) ಟೂಲ್ ಟಿಪ್ ಪಾಯಿಂಟ್ ನಿಯಂತ್ರಣ ಕಾರ್ಯವಾಗಿದೆ. RTCP ಕಾರ್ಯವನ್ನು ಆನ್ ಮಾಡಿದ ನಂತರ, ನಿಯಂತ್ರಕವು ಟೂಲ್ ಹೋಲ್ಡರ್ನ ಕೊನೆಯ ಮುಖವನ್ನು ಮೂಲತಃ ನಿಯಂತ್ರಿಸುವುದರಿಂದ ಟೂಲ್ ಟಿಪ್ ಪಾಯಿಂಟ್ ಅನ್ನು ನಿಯಂತ್ರಿಸಲು ಬದಲಾಗುತ್ತದೆ. ಕೆಳಗಿನ ಉಪಕರಣದ ಸಲಹೆಯು ರೋಟರಿ ಅಕ್ಷದಿಂದ ಉಂಟಾದ ರೇಖಾತ್ಮಕತೆಯನ್ನು ಸರಿದೂಗಿಸುತ್ತದೆ. ಉಪಕರಣದ ಘರ್ಷಣೆಯನ್ನು ತಡೆಯುವಲ್ಲಿ ದೋಷ. ವರ್ಕ್ಪೀಸ್ನ A ಬಿಂದುವಿನಲ್ಲಿ, ಉಪಕರಣದ ಅಕ್ಷದ ಮಧ್ಯಭಾಗವು ನೇರವಾಗಿ ಸಮತಲ ಸ್ಥಾನದಿಂದ ಲಂಬ ಸ್ಥಾನಕ್ಕೆ ಬದಲಾಗುತ್ತದೆ. ರೇಖೀಯ ದೋಷವನ್ನು ಸರಿಪಡಿಸದಿದ್ದರೆ, ಟೂಲ್ ಟಿಪ್ ಪಾಯಿಂಟ್ A ನಿಂದ ವಿಪಥಗೊಳ್ಳುತ್ತದೆ ಅಥವಾ ವರ್ಕ್ಪೀಸ್ ಅನ್ನು ಭೇದಿಸುತ್ತದೆ, ಇದು ಗಂಭೀರ ಅಪಘಾತವನ್ನು ಉಂಟುಮಾಡುತ್ತದೆ. ಸ್ವಿಂಗ್ ಆಕ್ಸಿಸ್ ಮತ್ತು ರೋಟರಿ ಅಕ್ಷದ ನಿರಂತರ ಚಲನೆಯು ಪಾಯಿಂಟ್ ಎ ಸ್ಥಾನದಲ್ಲಿ ಬದಲಾವಣೆಗಳನ್ನು ಉಂಟುಮಾಡುತ್ತದೆ, ಟೂಲ್ ಟಿಪ್ ಸ್ಥಾನದ ನಿರ್ದೇಶಾಂಕಗಳು ಪಾಯಿಂಟ್ ಎ ಗೆ ಹೋಲಿಸಿದರೆ ಯಾವಾಗಲೂ ಬದಲಾಗದೆ ಇರುವುದನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಪ್ರೋಗ್ರಾಂನಲ್ಲಿನ ಮೂಲ ಟೂಲ್ ಟಿಪ್ ಸ್ಥಾನವನ್ನು ಸರಿಪಡಿಸಬೇಕು. ಟೂಲ್ ಟಿಪ್ ಪಾಯಿಂಟ್ A. ನೊಂದಿಗೆ ಚಲಿಸುತ್ತಿದೆ, ಇದು ಕೆಳಗಿನ ಟೂಲ್ನ ತುದಿಯಾಗಿದೆ.
ಈ ಕಾರ್ಯವು 0 ~ 9 ಹಂತಗಳನ್ನು ಹೊಂದಿದೆ, 9 ನೇ ಹಂತವು ಅತ್ಯಧಿಕ ನಿಖರವಾಗಿದೆ, ಆದರೆ 1 ನೇ - 8 ನೇ ಹಂತವು ಸರ್ವೋ ಹಿಂದುಳಿದ ದೋಷವನ್ನು ಸರಿದೂಗಿಸುತ್ತದೆ ಮತ್ತು ಸಂಸ್ಕರಣಾ ಮಾರ್ಗವನ್ನು ಸರಿಯಾದ ಮೃದುತ್ವವನ್ನು ನೀಡುತ್ತದೆ.
ಹೆಚ್ಚಿನ ವೇಗ ಮತ್ತು ಹೆಚ್ಚಿನ ನಿಖರ ಮೂರು ಆಯಾಮದ ಸಂಸ್ಕರಣೆ
ಹೈ-ಸ್ಪೀಡ್ ಸ್ಪಿಂಡಲ್, 3D ಆರ್ಕ್ ಮ್ಯಾಚಿಂಗ್ ಕಂಟ್ರೋಲ್ 2000ಬ್ಲಾಕ್ಗಳನ್ನು ಮೊದಲೇ ಓದಬಹುದು ಮತ್ತು ಹೈ-ಸ್ಪೀಡ್ ಮತ್ತು ಹೈ-ನಿಖರವಾದ ಯಂತ್ರಕ್ಕಾಗಿ ಮೃದುವಾದ ಮಾರ್ಗ ತಿದ್ದುಪಡಿಯನ್ನು ಮಾಡಬಹುದು.
ಹೆಚ್ಚಿನ ಬಿಗಿತದ ರಚನೆ
ರಚನೆಯ ರೂಪವನ್ನು ಸುಧಾರಿಸಿ ಮತ್ತು ಯಂತ್ರದ ಬಿಗಿತವನ್ನು ಹೆಚ್ಚಿಸಲು ಹಂಚಿಕೆಯನ್ನು ಉತ್ತಮಗೊಳಿಸಿ. ಯಂತ್ರೋಪಕರಣ ಮತ್ತು ಕಾಲಮ್ನ ಆಕಾರ ಮತ್ತು ಹಂಚಿಕೆ ಆಪ್ಟಿಮೈಸೇಶನ್ CAE ವಿಶ್ಲೇಷಣೆಯ ಮೂಲಕ ಅತ್ಯಂತ ಸೂಕ್ತವಾದ ಆಕಾರವಾಗಿದೆ. ಹೊರಗೆ ಅಗೋಚರವಾಗಿರುವ ವಿವಿಧ ಸುಧಾರಿತ ಕ್ರಮಗಳು ಸ್ಪಿಂಡಲ್ ವೇಗವನ್ನು ತೋರಿಸಲಾಗದ ಸ್ಥಿರವಾದ ಕತ್ತರಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಪ್ರತಿಬಿಂಬಿಸುತ್ತವೆ.
ತಾಂತ್ರಿಕ ವಿಶೇಷಣಗಳು
| ಐಟಂ | ಘಟಕ | CV200 | CV300 | CV500 | |
| ಪ್ರಯಾಣ
| X/Y/Z ಅಕ್ಷದ ಪ್ರಯಾಣ | mm | 500×400×330 | 700*600*500 | 700×600×500 |
| ಸ್ಪಿಂಡಲ್ ಎಂಡ್ ಫೇಸ್ನಿಂದ ವರ್ಕ್ಟೇಬಲ್ ಮೇಲ್ಮೈಗೆ ದೂರ | mm | 100-430 | 150-650 | 130-630 | |
| ಸ್ಪಿಂಡಲ್ ಕೇಂದ್ರದಿಂದ ಕಾಲಮ್ ಮಾರ್ಗದರ್ಶಿ ರೈಲು ಮೇಲ್ಮೈಗೆ ದೂರ | mm | 412 | 628 | 628 | |
| ಎ-ಆಕ್ಸಿಸ್ 90° ಸ್ಪಿಂಡಲ್ ಸೆಂಟರ್ ಮತ್ತು ಸಿ-ಆಕ್ಸಿಸ್ ಡಿಸ್ಕ್ ಮೇಲ್ಮೈ ನಡುವಿನ ಗರಿಷ್ಠ ಅಂತರ | mm | 235 | 360 | 310 | |
| 3 ಅಕ್ಷದ ಫೀಡ್
| X/Y/Z ಅಕ್ಷದ ಕ್ಷಿಪ್ರ ಸ್ಥಳಾಂತರ | ಮೀ/ನಿಮಿ | 48/48/48 | 48/48/48 | 36/36/36 |
| ಫೀಡ್ ದರ ಕಡಿತ | ಮಿಮೀ/ನಿಮಿಷ | 1-24000 | 1-24000 | 1-24000 | |
| ಸ್ಪಿಂಡಲ್
| ಸ್ಪಿಂಡಲ್ ವಿಶೇಷಣಗಳು (ಅನುಸ್ಥಾಪನಾ ವ್ಯಾಸ/ಪ್ರಸರಣ ಮೋಡ್) | mm | 95/ನೇರ | 140/ನೇರ | 140/ನೇರ |
| ಸ್ಪಿಂಡಲ್ ಟೇಪರ್ | mm | BT30 | BT40 | BT40 | |
| ಸ್ಪಿಂಡಲ್ ವೇಗ | r/min | 12000 | 12000 | 12000 | |
| ಸ್ಪಿಂಡಲ್ ಮೋಟಾರ್ ಪವರ್ (ನಿರಂತರ/S3 25%) | kW | 8.2/12 | 15/22.5 | 15/22.5 | |
| ಸ್ಪಿಂಡಲ್ ಮೋಟಾರ್ ಟಾರ್ಕ್ (ನಿರಂತರ/S3 25%) | ಎನ್ಎಂ | 26/38 | 47.8/71.7 | 47.8/71.7 | |
| ಉಪಕರಣ ಪತ್ರಿಕೆ
| ಮ್ಯಾಗಜೀನ್ ಸಾಮರ್ಥ್ಯ | T | 21T | 24T | 24T |
| ಪರಿಕರ ಬದಲಾವಣೆ ಸಮಯ (TT) | s | 2.5 | 4 | 4 | |
| Max.Tool ವ್ಯಾಸ(ಪೂರ್ಣ ಉಪಕರಣ/ಖಾಲಿ ಉಪಕರಣ) | mm | 80 | 70/120 | 70/120 | |
| Max.Tool ಉದ್ದ | mm | 250 | 300 | 300 | |
| ಗರಿಷ್ಠ ಉಪಕರಣದ ತೂಕ | kg | 3 | 8 | 8 | |
| ಮಾರ್ಗದರ್ಶಿ
| ಎಕ್ಸ್-ಆಕ್ಸಿಸ್ ಮಾರ್ಗದರ್ಶಿ (ಗಾತ್ರ/ಸ್ಲೈಡರ್ಗಳ ಸಂಖ್ಯೆ) | mm | 30/2 | 35/2 ರೋಲರ್ | 45/2 ರೋಲರ್ |
| Y-ಆಕ್ಸಿಸ್ ಮಾರ್ಗದರ್ಶಿ (ಆಯಾಮಗಳು/ಸ್ಲೈಡರ್ಗಳ ಪ್ರಮಾಣ) |
| 30/2 | 35/2 ರೋಲರ್ | 45/2 ರೋಲರ್ | |
| Z-ಆಕ್ಸಿಸ್ ಮಾರ್ಗದರ್ಶಿ (ಆಯಾಮಗಳು/ಸ್ಲೈಡರ್ಗಳ ಪ್ರಮಾಣ) |
| 30/2 | 35/2 ರೋಲರ್ | 45/2 ರೋಲರ್ | |
|
ತಿರುಪು
| ಎಕ್ಸ್-ಆಕ್ಸಿಸ್ ಸ್ಕ್ರೂ |
| Φ28×16 | Φ40×16 | Φ40×16 |
| ವೈ-ಆಕ್ಸಿಸ್ ಸ್ಕ್ರೂ |
| Φ28×16 | Φ40×16 | Φ40×16 | |
| Z ಆಕ್ಸಿಸ್ ಸ್ಕ್ರೂ |
| Φ32×16 | Φ40×16 | Φ40×16 | |
| ನಿಖರತೆ
| ಸ್ಥಾನಿಕ ನಿಖರತೆ | mm | ±0.005/300 | ±0.005/300 | ±0.005/300 |
| ಪುನರಾವರ್ತನೆ | mm | ±0.003/300 | ±0.003/300 | ±0.003/300 | |
| 5 ಅಕ್ಷ
| ಟರ್ಂಟಬಲ್ ಡ್ರೈವ್ ವಿಧಾನ |
| ಮೋಟಾರ್ ನೇರ | ರೋಲರ್ ಕ್ಯಾಮೆರಾ | ರೋಲರ್ ಕ್ಯಾಮ್ |
| ತಿರುಗಿಸಬಹುದಾದ ವ್ಯಾಸ | mm | Φ200 | Φ300*250 | φ500*400 | |
| ಟರ್ನ್ಟೇಬಲ್ನ ಅನುಮತಿಸಬಹುದಾದ ಲೋಡ್ ತೂಕ (ಸಮತಲ/ಇಳಿಜಾರಿನಲ್ಲಿ) | kg | 40/20 | 100/70 | 200 | |
| A/C-ಆಕ್ಸಿಸ್ ಗರಿಷ್ಠ. ವೇಗ | rpm | 100/230 | 60/60 | 60/60 | |
| A-ಆಕ್ಸಿಸ್ ಸ್ಥಾನೀಕರಣ/ಪುನರಾವರ್ತನೆ | ಆರ್ಕ್-ಸೆಕೆಂಡು | 10/6 | 15/10 | 15/10 | |
| ಸಿ-ಆಕ್ಸಿಸ್ ಸ್ಥಾನೀಕರಣ/ಪುನರಾವರ್ತನೆ | ಆರ್ಕ್-ಸೆಕೆಂಡು | 8/4 | 15/10 | 15/10 | |
| ನಯಗೊಳಿಸುವಿಕೆ
| ನಯಗೊಳಿಸುವ ಘಟಕದ ಸಾಮರ್ಥ್ಯ | L | 1.8 | 1.8 | 1.8 |
| ತೈಲ ವಿಭಜಕ ವಿಧ |
| ವಾಲ್ಯೂಮೆಟ್ರಿಕ್ | ಗ್ರೀಸ್ ನಯಗೊಳಿಸುವಿಕೆ | ವಾಲ್ಯೂಮೆಟ್ರಿಕ್ | |
| ಇತರರು
| ವಾಯು ಬೇಡಿಕೆ | ಕೆಜಿ/ಸಿ㎡ | ≥6 | ≥6 | ≥6 |
| ವಾಯು ಮೂಲದ ಹರಿವು | mm3/ನಿಮಿ | ≥0.2 | ≥0.4 | ≥0.4 | |
| ಬ್ಯಾಟರಿ ಸಾಮರ್ಥ್ಯ | ಕೆವಿಎ | 10 | 22.5 | 26 | |
| ಯಂತ್ರದ ತೂಕ (ಸಮಗ್ರ) | t | 2.9 | 7 | 8 | |
| ಯಾಂತ್ರಿಕ ಆಯಾಮಗಳು (L×W×H) | mm | 1554×2346×2768 | 2248*2884*2860 | 2610×2884×3303 | |
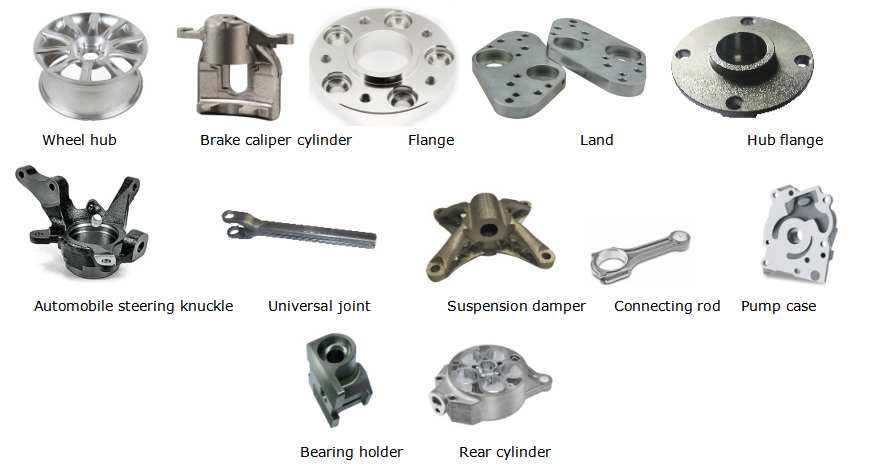
ಸಂಸ್ಕರಣಾ ಉದಾಹರಣೆ
1.ಆಟೋಮೋಟಿವ್ ಇಂಡಸ್ಟ್ರಿ
2.Precision ಫಿಕ್ಸ್ಚರ್

3.ಮಿಲಿಟರಿ ಉದ್ಯಮ






