BOSM -6025 ಆಪೋಸ್ಡ್-ಹೆಡ್ ಬೋರಿಂಗ್ ಮಿಲ್ಲಿಂಗ್ ಮೆಷಿನ್
1. ಸಲಕರಣೆಬಳಸಿ:
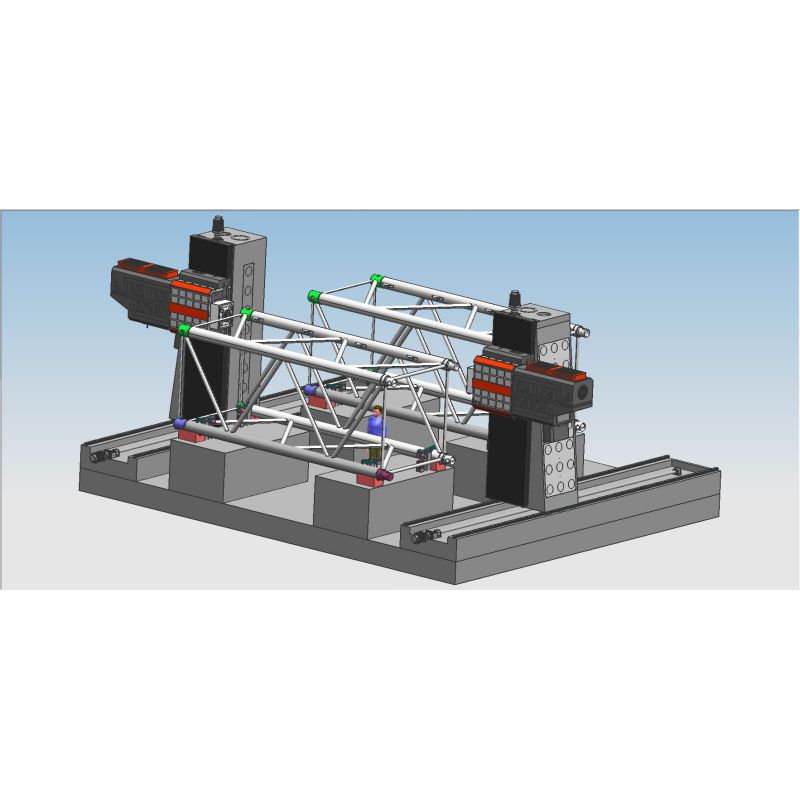
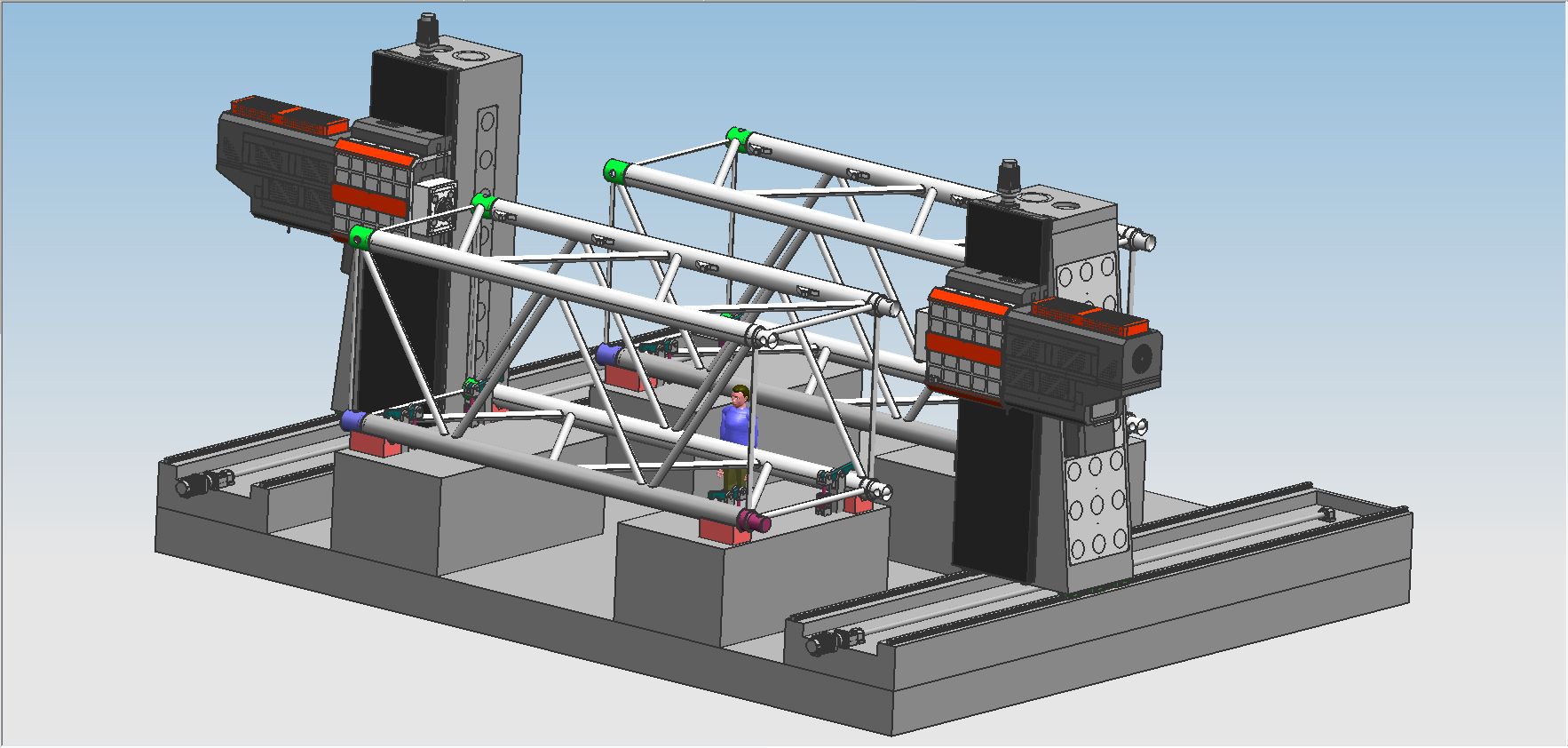
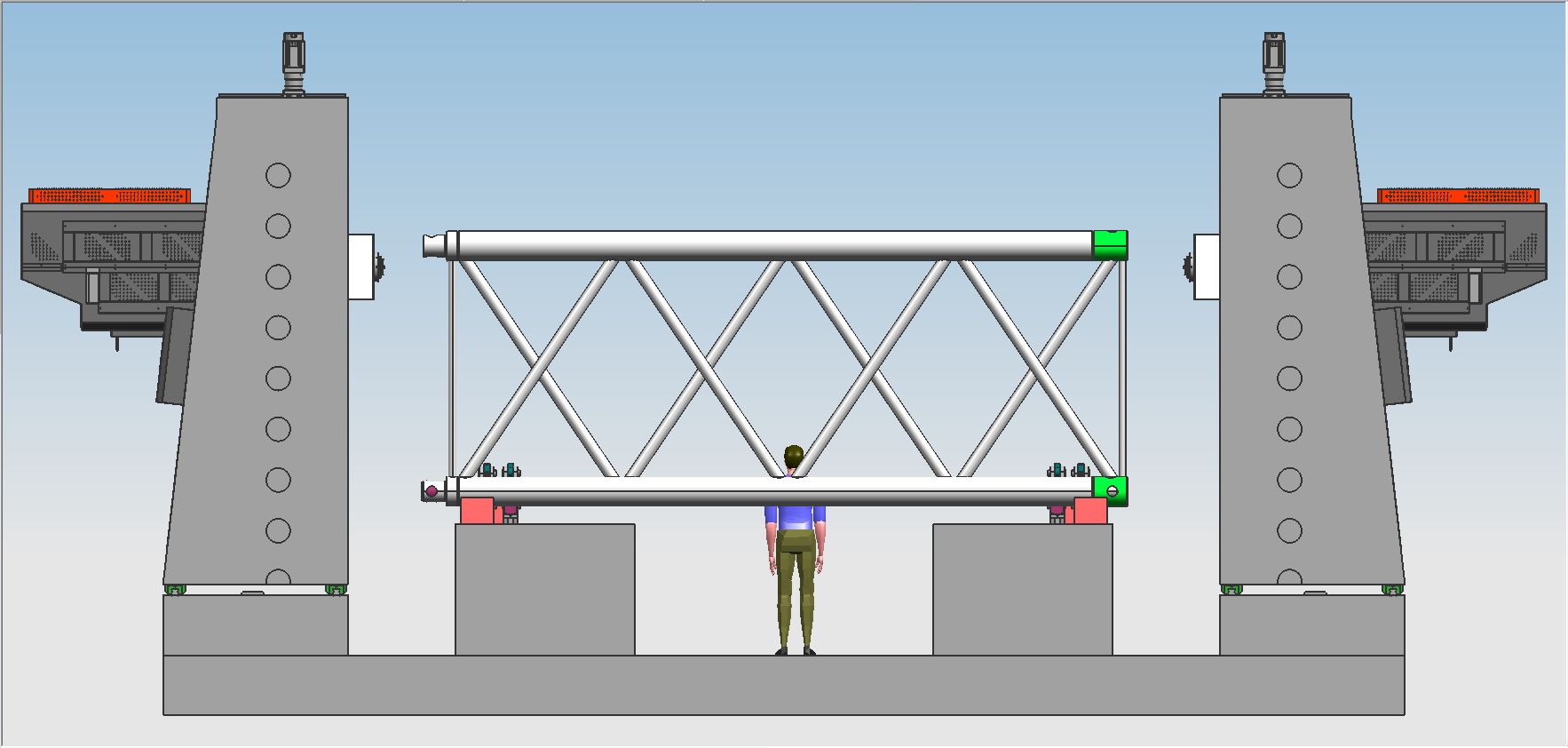
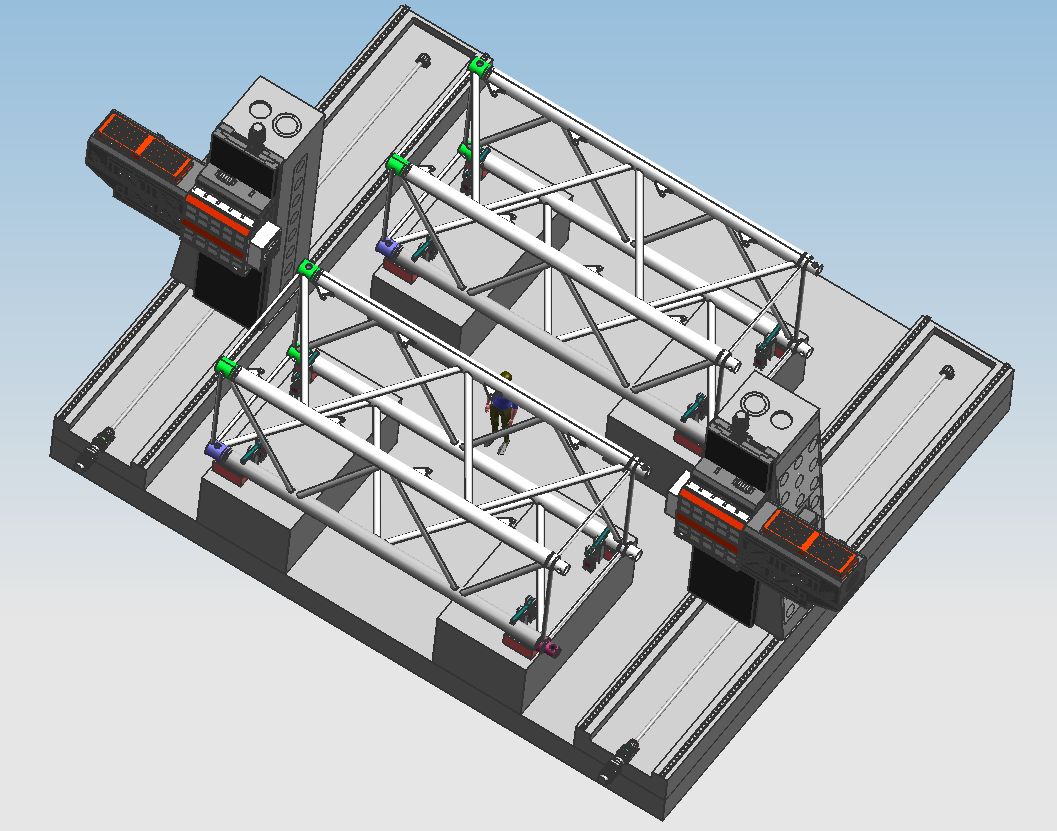
BOSM-6025 ಡಬಲ್-ಸ್ಟೇಷನ್, CNC ಲಂಬ ಕಾಲಮ್ ಚಲಿಸಬಲ್ಲ ಡಬಲ್-ಕಾಲಮ್ ಹೆಡ್-ಟು-ಹೆಡ್ ಬೋರಿಂಗ್ ಮತ್ತು ಮಿಲ್ಲಿಂಗ್ ಯಂತ್ರವು ನಿರ್ಮಾಣ ಯಂತ್ರಗಳ ಸಮ್ಮಿತೀಯ ವರ್ಕ್ಪೀಸ್ಗಳಿಗೆ ವಿಶೇಷ ಯಂತ್ರ ಸಾಧನವಾಗಿದೆ. ಯಂತ್ರ ಉಪಕರಣವು ವಿಶೇಷ ಚಲಿಸಬಲ್ಲ ಕಾಲಮ್ ಮತ್ತು ಎರಡು ಸೆಟ್ ಸಮತಲ ರಾಮ್ಗಳನ್ನು ಹೊಂದಿದೆ, ಇದು ವರ್ಕ್ಪೀಸ್ನ ಡ್ರಿಲ್ಲಿಂಗ್, ಮಿಲ್ಲಿಂಗ್, ಬೋರಿಂಗ್ ಮತ್ತು ಇತರ ಸಂಸ್ಕರಣೆಯನ್ನು ಪರಿಣಾಮಕಾರಿ ಸ್ಟ್ರೋಕ್ ವ್ಯಾಪ್ತಿಯಲ್ಲಿ ಅರಿತುಕೊಳ್ಳಬಹುದು, ವರ್ಕ್ಪೀಸ್ ಅನ್ನು ಒಂದೇ ಸಮಯದಲ್ಲಿ ಪ್ರಕ್ರಿಯೆಗೊಳಿಸಬಹುದು (ಅಗತ್ಯವಿಲ್ಲ ಸೆಕೆಂಡರಿ ಕ್ಲ್ಯಾಂಪಿಂಗ್ಗಾಗಿ), ವೇಗದ ಲೋಡಿಂಗ್ ಮತ್ತು ಇಳಿಸುವಿಕೆಯ ವೇಗ, ವೇಗದ ಸ್ಥಾನಿಕ ವೇಗ, ಹೆಚ್ಚಿನ ಸಂಸ್ಕರಣೆಯ ನಿಖರತೆ ಮತ್ತು ಹೆಚ್ಚಿನ ಸಂಸ್ಕರಣಾ ದಕ್ಷತೆ.
2. ಸಲಕರಣೆ ರಚನೆ:
2.1. ಯಂತ್ರ ಉಪಕರಣದ ಮುಖ್ಯ ಅಂಶಗಳು
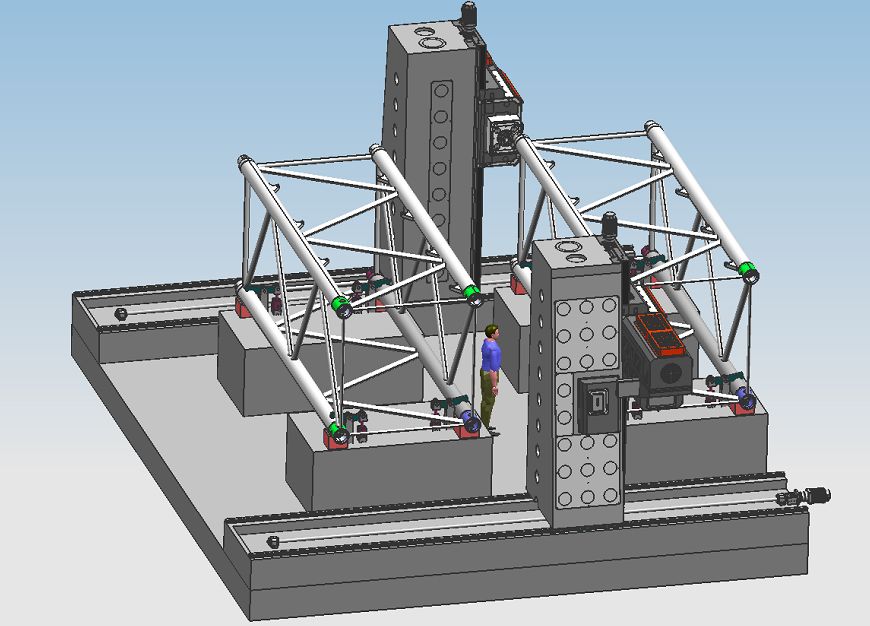
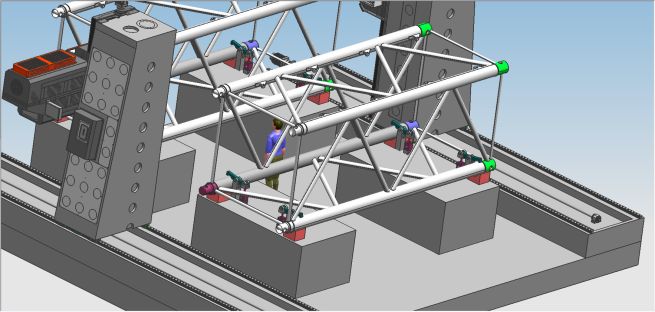
ಬೆಡ್, ವರ್ಕ್ಬೆಂಚ್, ಎಡ ಮತ್ತು ಬಲ ಕಾಲಮ್ಗಳು, ಕಿರಣಗಳು, ಸ್ಯಾಡಲ್ಗಳು, ರಾಮ್ಗಳು ಮತ್ತು ಇತರ ದೊಡ್ಡ ಭಾಗಗಳನ್ನು ರಾಳದ ಮರಳು ಮೋಲ್ಡಿಂಗ್, ಉತ್ತಮ ಗುಣಮಟ್ಟದ ಬೂದು ಕಬ್ಬಿಣ 250 ಎರಕಹೊಯ್ದ, ಬಿಸಿ ಮರಳಿನ ಪಿಟ್ನಲ್ಲಿ ಅನೆಲ್ ಮಾಡಲಾಗಿದೆ→ಕಂಪನ ವಯಸ್ಸಾಗುವಿಕೆ→ಬಿಸಿ ಕುಲುಮೆ ಅನೆಲಿಂಗ್→ಕಂಪನ ವಯಸ್ಸಾಗುವಿಕೆ→ ರಫ್ ಮ್ಯಾಚಿಂಗ್→ ಕಂಪನ ವಯಸ್ಸಾಗುವಿಕೆ→ ಬಿಸಿ ಕುಲುಮೆಯ ಅನೆಲಿಂಗ್→ಕಂಪನ ವಯಸ್ಸಾಗುವಿಕೆ→ ಪೂರ್ಣಗೊಳಿಸುವಿಕೆ, ಭಾಗಗಳ ನಕಾರಾತ್ಮಕ ಒತ್ತಡವನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ನಿವಾರಿಸುತ್ತದೆ ಮತ್ತು ಭಾಗಗಳ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಸ್ಥಿರವಾಗಿರಿಸುತ್ತದೆ. ಯಂತ್ರ ಉಪಕರಣವು ಮಿಲ್ಲಿಂಗ್, ಬೋರಿಂಗ್, ಡ್ರಿಲ್ಲಿಂಗ್, ಕೌಂಟರ್ಸಿಂಕಿಂಗ್, ಟ್ಯಾಪಿಂಗ್, ಇತ್ಯಾದಿ ಕಾರ್ಯಗಳನ್ನು ಹೊಂದಿದೆ ಮತ್ತು ಟೂಲ್ ಕೂಲಿಂಗ್ ವಿಧಾನವು ಬಾಹ್ಯ ಕೂಲಿಂಗ್ ಆಗಿದೆ, ಯಂತ್ರ ಉಪಕರಣವು 6 ಫೀಡ್ ಅಕ್ಷಗಳನ್ನು ಒಳಗೊಂಡಿದೆ, ಇದು 4-ಅಕ್ಷದ ಲಿಂಕ್ ಮತ್ತು 6-ಅಕ್ಷ ಏಕ- ಕ್ರಮ. 2 ಪವರ್ ಹೆಡ್ಗಳಿವೆ. ಯಂತ್ರ ಉಪಕರಣದ ಅಕ್ಷೀಯ ದಿಕ್ಕು ಮತ್ತು ಪವರ್ ಹೆಡ್ ಅನ್ನು ಕೆಳಗಿನ ಚಿತ್ರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ.
2. 2ಅಕ್ಷೀಯ ಪ್ರಸರಣ ಫೀಡ್ ಭಾಗದ ಮುಖ್ಯ ರಚನೆ
2.2.1 X 1/X2 ಅಕ್ಷ: ಸ್ಥಿರ ಹಾಸಿಗೆಯ ಮಾರ್ಗದರ್ಶಿ ರೈಲಿನ ಉದ್ದಕ್ಕೂ ಕಾಲಮ್ ರೇಖಾಂಶವಾಗಿ ಪರಸ್ಪರ ತಿರುಗುತ್ತದೆ.
ಎಕ್ಸ್-ಆಕ್ಸಿಸ್ ಟ್ರಾನ್ಸ್ಮಿಷನ್: ಎಕ್ಸ್-ಅಕ್ಷದ ರೇಖಾತ್ಮಕ ಚಲನೆಯನ್ನು ಅರಿತುಕೊಳ್ಳಲು ಬಾಲ್ ಸ್ಕ್ರೂ ಟ್ರಾನ್ಸ್ಮಿಷನ್ ಮೂಲಕ ಎರಡು ಕಾಲಮ್ಗಳನ್ನು ಓಡಿಸಲು ಎಸಿ ಸರ್ವೋ ಮೋಟಾರ್ ಮತ್ತು ಹೆಚ್ಚಿನ-ನಿಖರವಾದ ಪ್ಲಾನೆಟರಿ ರಿಡ್ಯೂಸರ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.
ಮಾರ್ಗದರ್ಶಿ ರೈಲು ರೂಪ: ಎರಡು ಹೆಚ್ಚಿನ ಸಾಮರ್ಥ್ಯದ ನಿಖರವಾದ ರೇಖೀಯ ಮಾರ್ಗದರ್ಶಿ ಹಳಿಗಳನ್ನು ಹಾಕಿ.
2.2.2 Y1 ಅಕ್ಷ: ಪವರ್ ಹೆಡ್ ಮತ್ತು ರಾಮ್ ಅನ್ನು ಕಾಲಮ್ನ ಮುಂಭಾಗದ ಭಾಗದಲ್ಲಿ ಲಂಬವಾಗಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ ಮತ್ತು ಕಾಲಮ್ನ ಗೈಡ್ ರೈಲ್ನ ಉದ್ದಕ್ಕೂ ಎಡ ಮತ್ತು ಬಲಕ್ಕೆ ಪರಸ್ಪರ ವಿನಿಮಯ ಮಾಡಿಕೊಳ್ಳಿ.
Y1-ಆಕ್ಸಿಸ್ ಟ್ರಾನ್ಸ್ಮಿಷನ್: AC ಸರ್ವೋ ಮೋಟರ್ ಅನ್ನು ಚಲಿಸಲು ಸ್ಯಾಡಲ್ ಅನ್ನು ಓಡಿಸಲು ಬಾಲ್ ಸ್ಕ್ರೂ ಅನ್ನು ಓಡಿಸಲು ಬಳಸಲಾಗುತ್ತದೆ ಮತ್ತು Y1- ಅಕ್ಷದ ರೇಖಾತ್ಮಕ ಚಲನೆಯನ್ನು ಅರಿತುಕೊಳ್ಳುತ್ತದೆ.
ಮಾರ್ಗದರ್ಶಿ ರೈಲು ರೂಪ: 4 ರೇಖೀಯ ಮಾರ್ಗದರ್ಶಿ ಹಳಿಗಳು + ಹಾರ್ಡ್ ರೈಲ್ ಸ್ಕ್ವೇರ್ ರಾಮ್ ಸಂಯೋಜಿಸಲಾಗಿದೆ.
2.2.3 Y2 ಅಕ್ಷ: ಪವರ್ ಹೆಡ್ನ ಎರಡನೇ ರಾಮ್ ಅನ್ನು ಕಾಲಮ್ನ ಮುಂಭಾಗದ ಭಾಗದಲ್ಲಿ ಲಂಬವಾಗಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ ಮತ್ತು ಕಾಲಮ್ನ ಗೈಡ್ ರೈಲ್ನ ಉದ್ದಕ್ಕೂ ಎಡ ಮತ್ತು ಬಲಕ್ಕೆ ಪರಸ್ಪರ ವಿನಿಮಯ ಮಾಡಿಕೊಳ್ಳುತ್ತದೆ.
Y2-ಆಕ್ಸಿಸ್ ಟ್ರಾನ್ಸ್ಮಿಷನ್: AC ಸರ್ವೋ ಮೋಟಾರ್ ಅನ್ನು ಬಾಲ್ ಸ್ಕ್ರೂ ಅನ್ನು ಚಾಲನೆ ಮಾಡಲು ಸ್ಯಾಡಲ್ ಅನ್ನು ಚಲಿಸಲು ಮತ್ತು Y2- ಅಕ್ಷದ ರೇಖಾತ್ಮಕ ಚಲನೆಯನ್ನು ಅರಿತುಕೊಳ್ಳಲು ಬಳಸಲಾಗುತ್ತದೆ.
ಮಾರ್ಗದರ್ಶಿ ರೈಲು ರೂಪ: 4 ರೇಖೀಯ ಮಾರ್ಗದರ್ಶಿ ಹಳಿಗಳು + ಹಾರ್ಡ್ ರೈಲ್ ಸ್ಕ್ವೇರ್ ರಾಮ್ ಸಂಯೋಜಿಸಲಾಗಿದೆ.
2.2.4 Z1 ಅಕ್ಷ: ಪವರ್ ಹೆಡ್ ಸ್ಲೈಡಿಂಗ್ ಸ್ಯಾಡಲ್ ಅನ್ನು ಬಲ ಕಾಲಮ್ನ ಮುಂಭಾಗದ ಭಾಗದಲ್ಲಿ ಲಂಬವಾಗಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ ಮತ್ತು ಕಾಲಮ್ ಗೈಡ್ ರೈಲ್ನ ಉದ್ದಕ್ಕೂ ಮೇಲಕ್ಕೆ ಮತ್ತು ಕೆಳಕ್ಕೆ ಪ್ರತಿಫಲಿಸುತ್ತದೆ.
Z1-ಆಕ್ಸಿಸ್ ಟ್ರಾನ್ಸ್ಮಿಷನ್: AC ಸರ್ವೋ ಮೋಟಾರ್ ಮತ್ತು ಹೈ-ನಿಖರವಾದ ಪ್ಲಾನೆಟರಿ ರಿಡ್ಯೂಸರ್ ಅನ್ನು Z1 -ಆಕ್ಸಿಸ್ ಲೀನಿಯರ್ ಚಲನೆಯನ್ನು ಅರಿತುಕೊಳ್ಳಲು ಬಾಲ್ ಸ್ಕ್ರೂ ಮೂಲಕ ಚಲಿಸಲು ರಾಮ್ ಅನ್ನು ಓಡಿಸಲು ಬಳಸಲಾಗುತ್ತದೆ.
ಮಾರ್ಗದರ್ಶಿ ರೈಲು ರೂಪ: 2 ರೇಖೀಯ ಮಾರ್ಗದರ್ಶಿ ಹಳಿಗಳು.
2.2.5 Z2 ಅಕ್ಷ: ಪವರ್ ಹೆಡ್ ಸ್ಲೈಡ್ ಸ್ಯಾಡಲ್ ಅನ್ನು ಬಲ ಕಾಲಮ್ನ ಮುಂಭಾಗದ ಭಾಗದಲ್ಲಿ ಲಂಬವಾಗಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ ಮತ್ತು ಕಾಲಮ್ ಗೈಡ್ ರೈಲ್ನ ಉದ್ದಕ್ಕೂ ಮೇಲಕ್ಕೆ ಮತ್ತು ಕೆಳಕ್ಕೆ ಪರಸ್ಪರ ವಿನಿಮಯಗೊಳ್ಳುತ್ತದೆ.
Z1-ಆಕ್ಸಿಸ್ ಟ್ರಾನ್ಸ್ಮಿಷನ್: AC ಸರ್ವೋ ಮೋಟಾರ್ ಜೊತೆಗೆ ಹೆಚ್ಚಿನ ನಿಖರವಾದ ಪ್ಲಾನೆಟರಿ ರಿಡ್ಯೂಸರ್ ಅನ್ನು Z2 -ಆಕ್ಸಿಸ್ ಲೀನಿಯರ್ ಚಲನೆಯನ್ನು ಅರಿತುಕೊಳ್ಳಲು ಬಾಲ್ ಸ್ಕ್ರೂ ಮೂಲಕ ಚಲಿಸಲು ರಾಮ್ ಅನ್ನು ಓಡಿಸಲು ಬಳಸಲಾಗುತ್ತದೆ.
ಮಾರ್ಗದರ್ಶಿ ರೈಲು ರೂಪ: 2 ರೇಖೀಯ ಮಾರ್ಗದರ್ಶಿ ಹಳಿಗಳು
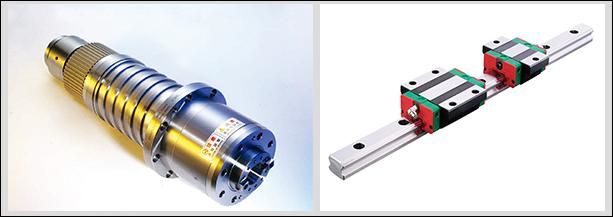
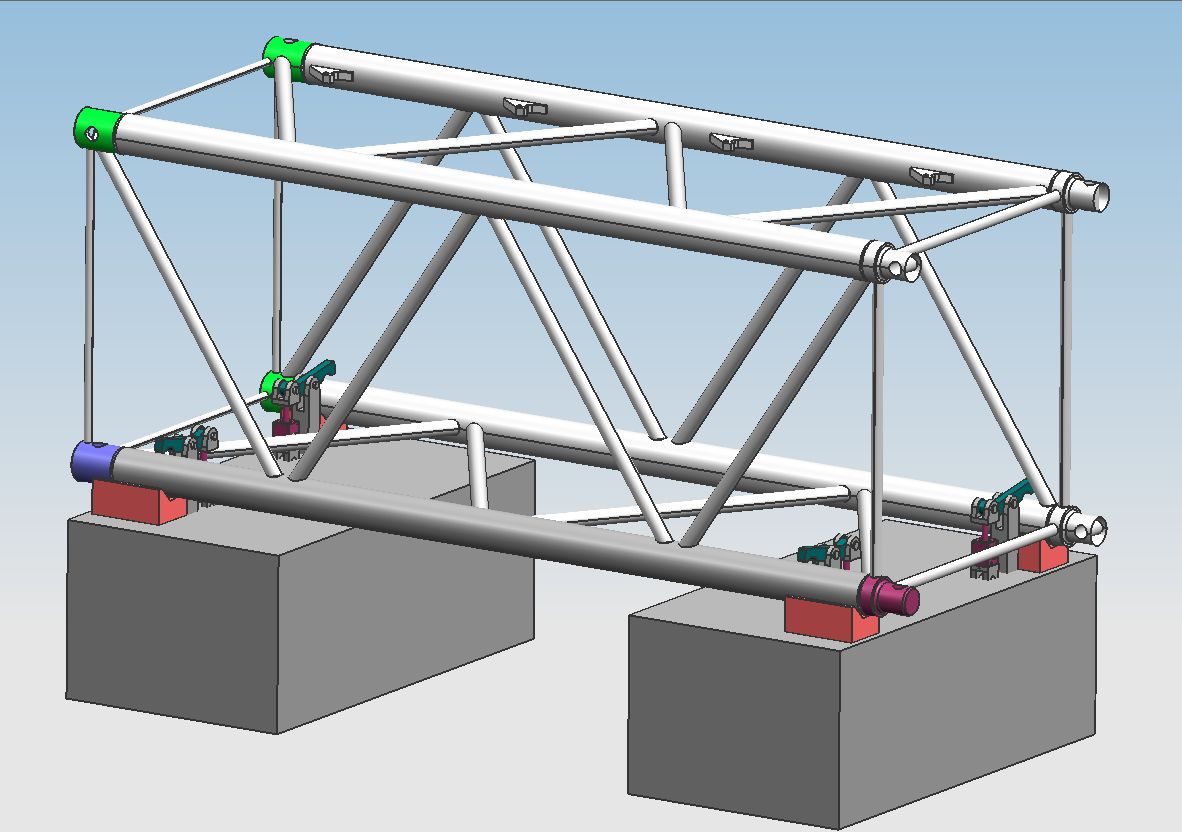
ನೀರಸ ಮತ್ತು ಮಿಲ್ಲಿಂಗ್ ಪವರ್ ಹೆಡ್ (ಪವರ್ ಹೆಡ್ 1 ಮತ್ತು 2 ಸೇರಿದಂತೆ) ಒಂದು ಸಂಯುಕ್ತ ಚದರ ರಾಮ್, ಮತ್ತು ಚಲಿಸುವ ದಿಕ್ಕನ್ನು 4 ಲೀನಿಯರ್ ರೋಲರ್ ಗೈಡ್ ರೈಲ್ಗಳು ನಿರ್ದೇಶಿಸುತ್ತವೆ. ನಿಖರವಾದ ಬಾಲ್ ಸ್ಕ್ರೂ ಜೋಡಿಯನ್ನು ಓಡಿಸಲು ಡ್ರೈವ್ ಎಸಿ ಸರ್ವೋ ಮೋಟಾರ್ ಅನ್ನು ಬಳಸುತ್ತದೆ. ಯಂತ್ರವು ಸಾರಜನಕ ಸಮತೋಲನ ಪಟ್ಟಿಯನ್ನು ಹೊಂದಿದೆ. , ಸ್ಕ್ರೂ ಮತ್ತು ಸರ್ವೋ ಮೋಟಾರ್ನಲ್ಲಿ ಯಂತ್ರದ ತಲೆಯ ಬೇರಿಂಗ್ ಸಾಮರ್ಥ್ಯವನ್ನು ಕಡಿಮೆ ಮಾಡಿ. Z- ಆಕ್ಸಿಸ್ ಮೋಟಾರ್ ಸ್ವಯಂಚಾಲಿತ ಬ್ರೇಕ್ ಕಾರ್ಯವನ್ನು ಹೊಂದಿದೆ. ವಿದ್ಯುತ್ ವೈಫಲ್ಯದ ಸಂದರ್ಭದಲ್ಲಿ, ಸ್ವಯಂಚಾಲಿತ ಬ್ರೇಕ್ ಮೋಟಾರ್ ಶಾಫ್ಟ್ ಅನ್ನು ಬಿಗಿಯಾಗಿ ಹಿಡಿದಿಟ್ಟುಕೊಳ್ಳುತ್ತದೆ ಆದ್ದರಿಂದ ಅದು ತಿರುಗಿಸಲು ಸಾಧ್ಯವಿಲ್ಲ. ಕೆಲಸ ಮಾಡುವಾಗ, ಡ್ರಿಲ್ ಬಿಟ್ ವರ್ಕ್ಪೀಸ್ ಅನ್ನು ಸ್ಪರ್ಶಿಸದಿದ್ದಾಗ, ಅದು ವೇಗವಾಗಿ ಆಹಾರವನ್ನು ನೀಡುತ್ತದೆ; ಡ್ರಿಲ್ ಬಿಟ್ ವರ್ಕ್ಪೀಸ್ ಅನ್ನು ಮುಟ್ಟಿದಾಗ, ಅದು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ವರ್ಕಿಂಗ್ ಫೀಡ್ಗೆ ಬದಲಾಗುತ್ತದೆ. ಡ್ರಿಲ್ ಬಿಟ್ ವರ್ಕ್ಪೀಸ್ಗೆ ತೂರಿಕೊಂಡಾಗ, ಅದು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ವೇಗದ ರಿವೈಂಡ್ಗೆ ಬದಲಾಗುತ್ತದೆ; ಡ್ರಿಲ್ ಬಿಟ್ನ ಅಂತ್ಯವು ವರ್ಕ್ಪೀಸ್ನಿಂದ ಹೊರಟು ಸೆಟ್ ಸ್ಥಾನವನ್ನು ತಲುಪಿದಾಗ, ಅದು ಸ್ವಯಂಚಾಲಿತ ಪರಿಚಲನೆಯನ್ನು ಅರಿತುಕೊಳ್ಳಲು ಮುಂದಿನ ರಂಧ್ರದ ಸ್ಥಾನಕ್ಕೆ ಚಲಿಸುತ್ತದೆ. ಮತ್ತು ಇದು ಕಾರ್ಮಿಕ ಉತ್ಪಾದಕತೆಯನ್ನು ಸುಧಾರಿಸುವ ಬ್ಲೈಂಡ್ ಹೋಲ್ ಡ್ರಿಲ್ಲಿಂಗ್, ಮಿಲ್ಲಿಂಗ್, ಚೇಂಫರಿಂಗ್, ಚಿಪ್ ಬ್ರೇಕಿಂಗ್, ಸ್ವಯಂಚಾಲಿತ ಚಿಪ್ ತೆಗೆಯುವಿಕೆ ಇತ್ಯಾದಿಗಳ ಕಾರ್ಯಗಳನ್ನು ಅರಿತುಕೊಳ್ಳಬಹುದು.


500mm ಸ್ಟ್ರೋಕ್ ಕಾಂಪೌಂಡ್ ಸ್ಕ್ವೇರ್ ರಾಮ್ ಪವರ್ ಹೆಡ್ ಸ್ಕ್ವೇರ್ ರಾಮ್ನ ಬಿಗಿತವನ್ನು ಉಳಿಸಿಕೊಳ್ಳುವಾಗ ಮಾರ್ಗದರ್ಶಿ ನಿಖರತೆಯನ್ನು ಹೆಚ್ಚು ಸುಧಾರಿಸಲು ಸಾಂಪ್ರದಾಯಿಕ ಒಳಸೇರಿಸುವಿಕೆಯ ಬದಲಿಗೆ ರೇಖೀಯ ಮಾರ್ಗದರ್ಶಿಗಳನ್ನು ಬಳಸುತ್ತದೆ.
2.3. ವರ್ಕ್ಪೀಸ್ ಹೈಡ್ರಾಲಿಕ್ ಬಿಗಿಗೊಳಿಸುವ ಕಾರ್ಯ
2.4ಚಿಪ್ ತೆಗೆಯುವಿಕೆ ಮತ್ತು ತಂಪಾಗಿಸುವಿಕೆ
ವರ್ಕ್ಬೆಂಚ್ನ ಕೆಳಗೆ ಎರಡೂ ಬದಿಗಳಲ್ಲಿ ಸುರುಳಿಯಾಕಾರದ ಮತ್ತು ಫ್ಲಾಟ್ ಚೈನ್ ಚಿಪ್ ಕನ್ವೇಯರ್ಗಳನ್ನು ಸ್ಥಾಪಿಸಲಾಗಿದೆ ಮತ್ತು ನಾಗರಿಕ ಉತ್ಪಾದನೆಯನ್ನು ಅರಿತುಕೊಳ್ಳಲು ಚಿಪ್ಗಳನ್ನು ಎರಡು ಹಂತಗಳ ಸುರುಳಿ ಮತ್ತು ಚೈನ್ ಪ್ಲೇಟ್ಗಳ ಮೂಲಕ ಕೊನೆಯಲ್ಲಿ ಚಿಪ್ ಕನ್ವೇಯರ್ಗೆ ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಬಿಡುಗಡೆ ಮಾಡಬಹುದು. ಚಿಪ್ ಕನ್ವೇಯರ್ನ ಕೂಲಿಂಗ್ ಟ್ಯಾಂಕ್ನಲ್ಲಿ ಕೂಲಿಂಗ್ ಪಂಪ್ ಇದೆ, ಇದು ಉಪಕರಣದ ಕಾರ್ಯಕ್ಷಮತೆ ಮತ್ತು ಸೇವಾ ಜೀವನವನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಉಪಕರಣದ ಬಾಹ್ಯ ಕೂಲಿಂಗ್ಗಾಗಿ ಬಳಸಬಹುದು ಮತ್ತು ಶೀತಕವನ್ನು ಮರುಬಳಕೆ ಮಾಡಬಹುದು.
3. ಪೂರ್ಣ ಡಿಜಿಟಲ್ ಸಂಖ್ಯಾತ್ಮಕ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆ:
3.1. ಚಿಪ್ ಬ್ರೇಕಿಂಗ್ ಕಾರ್ಯದೊಂದಿಗೆ, ಚಿಪ್ ಬ್ರೇಕಿಂಗ್ ಸಮಯ ಮತ್ತು ಚಿಪ್ ಬ್ರೇಕಿಂಗ್ ಸೈಕಲ್ ಅನ್ನು ಮ್ಯಾನ್-ಮೆಷಿನ್ ಇಂಟರ್ಫೇಸ್ನಲ್ಲಿ ಹೊಂದಿಸಬಹುದು.
3.2. ಟೂಲ್ ಲಿಫ್ಟಿಂಗ್ ಫಂಕ್ಷನ್ನೊಂದಿಗೆ, ಟೂಲ್ ಲಿಫ್ಟಿಂಗ್ ದೂರವನ್ನು ಮ್ಯಾನ್-ಮೆಷಿನ್ ಇಂಟರ್ಫೇಸ್ನಲ್ಲಿ ಹೊಂದಿಸಬಹುದು. ಪ್ರಕ್ರಿಯೆಯು ಈ ದೂರವನ್ನು ತಲುಪಿದಾಗ, ಉಪಕರಣವನ್ನು ತ್ವರಿತವಾಗಿ ಮೇಲಕ್ಕೆತ್ತಲಾಗುತ್ತದೆ, ನಂತರ ಚಿಪ್ಸ್ ಅನ್ನು ಎಸೆಯಲಾಗುತ್ತದೆ ಮತ್ತು ನಂತರ ಕೊರೆಯುವ ಮೇಲ್ಮೈಗೆ ವೇಗವಾಗಿ ಮುಂದಕ್ಕೆ ಮತ್ತು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಕೆಲಸ ಮಾಡಲು ಪರಿವರ್ತಿಸಲಾಗುತ್ತದೆ.
3.3. ಕೇಂದ್ರೀಕೃತ ಕಾರ್ಯಾಚರಣೆ ನಿಯಂತ್ರಣ ಬಾಕ್ಸ್ ಮತ್ತು ಹ್ಯಾಂಡ್ಹೆಲ್ಡ್ ಘಟಕವು ಸಂಖ್ಯಾತ್ಮಕ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಯನ್ನು ಅಳವಡಿಸಿಕೊಂಡಿದೆ ಮತ್ತು USB ಇಂಟರ್ಫೇಸ್ ಮತ್ತು LCD ಲಿಕ್ವಿಡ್ ಕ್ರಿಸ್ಟಲ್ ಡಿಸ್ಪ್ಲೇಯೊಂದಿಗೆ ಅಳವಡಿಸಲಾಗಿದೆ. ಪ್ರೋಗ್ರಾಮಿಂಗ್, ಸಂಗ್ರಹಣೆ, ಪ್ರದರ್ಶನ ಮತ್ತು ಸಂವಹನವನ್ನು ಸುಲಭಗೊಳಿಸಲು, ಕಾರ್ಯಾಚರಣೆಯ ಇಂಟರ್ಫೇಸ್ ಮ್ಯಾನ್-ಮೆಷಿನ್ ಡೈಲಾಗ್, ದೋಷ ಪರಿಹಾರ ಮತ್ತು ಸ್ವಯಂಚಾಲಿತ ಎಚ್ಚರಿಕೆಯಂತಹ ಕಾರ್ಯಗಳನ್ನು ಹೊಂದಿದೆ.
3.4. ಉಪಕರಣವು ಸಂಸ್ಕರಣೆ ಮಾಡುವ ಮೊದಲು ರಂಧ್ರದ ಸ್ಥಾನವನ್ನು ಪೂರ್ವವೀಕ್ಷಣೆ ಮತ್ತು ಮರು-ಪರಿಶೀಲಿಸುವ ಕಾರ್ಯವನ್ನು ಹೊಂದಿದೆ, ಮತ್ತು ಕಾರ್ಯಾಚರಣೆಯು ತುಂಬಾ ಅನುಕೂಲಕರವಾಗಿದೆ.
4. ಸ್ವಯಂಚಾಲಿತ ನಯಗೊಳಿಸುವಿಕೆ
ಮೆಷಿನ್ ಟೂಲ್ ನಿಖರವಾದ ರೇಖೀಯ ಮಾರ್ಗದರ್ಶಿ ರೈಲು ಜೋಡಿಗಳು, ನಿಖರವಾದ ಬಾಲ್ ಸ್ಕ್ರೂ ಜೋಡಿಗಳು ಮತ್ತು ಇತರ ಹೆಚ್ಚಿನ-ನಿಖರ ಚಲನೆಯ ಜೋಡಿಗಳು ಸ್ವಯಂಚಾಲಿತ ನಯಗೊಳಿಸುವ ವ್ಯವಸ್ಥೆಗಳೊಂದಿಗೆ ಅಳವಡಿಸಲ್ಪಟ್ಟಿವೆ. ಸ್ವಯಂಚಾಲಿತ ನಯಗೊಳಿಸುವ ಪಂಪ್ ಒತ್ತಡದ ತೈಲವನ್ನು ಉತ್ಪಾದಿಸುತ್ತದೆ, ಮತ್ತು ಪರಿಮಾಣಾತ್ಮಕ ಲೂಬ್ರಿಕೇಟರ್ ಆಯಿಲ್ ಚೇಂಬರ್ ತೈಲವನ್ನು ಪ್ರವೇಶಿಸುತ್ತದೆ. ತೈಲ ಚೇಂಬರ್ ಎಣ್ಣೆಯಿಂದ ತುಂಬಿದ ನಂತರ, ಸಿಸ್ಟಮ್ ಒತ್ತಡವು 1.4-1.75Mpa ಗೆ ಏರಿದಾಗ, ಸಿಸ್ಟಮ್ನಲ್ಲಿನ ಒತ್ತಡದ ಸ್ವಿಚ್ ಮುಚ್ಚಲ್ಪಡುತ್ತದೆ, ಪಂಪ್ ನಿಲ್ಲುತ್ತದೆ ಮತ್ತು ಅದೇ ಸಮಯದಲ್ಲಿ ಇಳಿಸುವ ಕವಾಟವನ್ನು ಇಳಿಸುತ್ತದೆ. ರಸ್ತೆಯಲ್ಲಿನ ತೈಲ ಒತ್ತಡವು 0.2Mpa ಗಿಂತ ಕಡಿಮೆಯಾದಾಗ, ಪರಿಮಾಣಾತ್ಮಕ ಲೂಬ್ರಿಕೇಟರ್ ನಯಗೊಳಿಸುವ ಬಿಂದುವನ್ನು ತುಂಬಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ ಮತ್ತು ಒಂದು ತೈಲ ತುಂಬುವಿಕೆಯನ್ನು ಪೂರ್ಣಗೊಳಿಸುತ್ತದೆ. ಪರಿಮಾಣಾತ್ಮಕ ತೈಲ ಇಂಜೆಕ್ಟರ್ನ ನಿಖರವಾದ ತೈಲ ಪೂರೈಕೆ ಮತ್ತು ಸಿಸ್ಟಮ್ ಒತ್ತಡದ ಪತ್ತೆಯಿಂದಾಗಿ, ತೈಲ ಪೂರೈಕೆಯು ವಿಶ್ವಾಸಾರ್ಹವಾಗಿದೆ, ಪ್ರತಿ ಚಲನಶಾಸ್ತ್ರದ ಜೋಡಿಯ ಮೇಲ್ಮೈಯಲ್ಲಿ ತೈಲ ಫಿಲ್ಮ್ ಇರುವುದನ್ನು ಖಾತ್ರಿಪಡಿಸುತ್ತದೆ, ಘರ್ಷಣೆ ಮತ್ತು ಉಡುಗೆಗಳನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ಹಾನಿಯನ್ನು ತಡೆಯುತ್ತದೆ. ಯಂತ್ರ ಉಪಕರಣದ ನಿಖರತೆ ಮತ್ತು ಜೀವಿತಾವಧಿಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಅಧಿಕ ತಾಪದಿಂದ ಉಂಟಾಗುವ ಆಂತರಿಕ ರಚನೆ. ಸ್ಲೈಡಿಂಗ್ ಗೈಡ್ ರೈಲ್ ಜೋಡಿಯೊಂದಿಗೆ ಹೋಲಿಸಿದರೆ, ಈ ಯಂತ್ರ ಉಪಕರಣದಲ್ಲಿ ಬಳಸಲಾದ ರೋಲಿಂಗ್ ಲೀನಿಯರ್ ಗೈಡ್ ರೈಲ್ ಜೋಡಿಯು ಹಲವಾರು ಪ್ರಯೋಜನಗಳನ್ನು ಹೊಂದಿದೆ:
① ಹೆಚ್ಚಿನ ಚಲನೆಯ ಸಂವೇದನೆ, ರೋಲಿಂಗ್ ಗೈಡ್ ರೈಲಿನ ಘರ್ಷಣೆ ಗುಣಾಂಕವು ಚಿಕ್ಕದಾಗಿದೆ, ಕೇವಲ 0.0025-0.01, ಮತ್ತು ಚಾಲನಾ ಶಕ್ತಿಯು ಬಹಳವಾಗಿ ಕಡಿಮೆಯಾಗುತ್ತದೆ, ಇದು ಸಾಮಾನ್ಯ ಯಂತ್ರೋಪಕರಣಗಳ 1 ಗೆ ಮಾತ್ರ ಸಮನಾಗಿರುತ್ತದೆ. /10. ② ಡೈನಾಮಿಕ್ ಮತ್ತು ಸ್ಟ್ಯಾಟಿಕ್ ಘರ್ಷಣೆಯ ನಡುವಿನ ವ್ಯತ್ಯಾಸವು ತುಂಬಾ ಚಿಕ್ಕದಾಗಿದೆ ಮತ್ತು ಅನುಸರಣಾ ಕಾರ್ಯಕ್ಷಮತೆ ಅತ್ಯುತ್ತಮವಾಗಿದೆ, ಅಂದರೆ, ಡ್ರೈವಿಂಗ್ ಸಿಗ್ನಲ್ ಮತ್ತು ಯಾಂತ್ರಿಕ ಕ್ರಿಯೆಯ ನಡುವಿನ ಸಮಯದ ಮಧ್ಯಂತರವು ತುಂಬಾ ಚಿಕ್ಕದಾಗಿದೆ, ಇದು ಪ್ರತಿಕ್ರಿಯೆಯ ವೇಗ ಮತ್ತು ಸೂಕ್ಷ್ಮತೆಯನ್ನು ಸುಧಾರಿಸಲು ಅನುಕೂಲಕರವಾಗಿದೆ. ಸಂಖ್ಯಾತ್ಮಕ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆ.
③ಇದು ಹೆಚ್ಚಿನ ವೇಗದ ರೇಖಾತ್ಮಕ ಚಲನೆಗೆ ಸೂಕ್ತವಾಗಿದೆ ಮತ್ತು ಅದರ ತ್ವರಿತ ವೇಗವು ಸ್ಲೈಡಿಂಗ್ ಗೈಡ್ ರೈಲ್ಗಳಿಗಿಂತ ಸುಮಾರು 10 ಪಟ್ಟು ಹೆಚ್ಚು. ④ ಇದು ಅಂತರವಿಲ್ಲದ ಚಲನೆಯನ್ನು ಅರಿತುಕೊಳ್ಳಬಹುದು ಮತ್ತು ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಯ ಚಲನೆಯ ಬಿಗಿತವನ್ನು ಸುಧಾರಿಸಬಹುದು. ⑤ವೃತ್ತಿಪರ ತಯಾರಕರಿಂದ ತಯಾರಿಸಲ್ಪಟ್ಟಿದೆ, ಇದು ಹೆಚ್ಚಿನ ನಿಖರತೆ, ಉತ್ತಮ ಬಹುಮುಖತೆ ಮತ್ತು ಸುಲಭ ನಿರ್ವಹಣೆಯನ್ನು ಹೊಂದಿದೆ.
5. ಆಕ್ಸಿಸ್ ಲೇಸರ್ ತಪಾಸಣೆ:
BOSMAN ನ ಪ್ರತಿಯೊಂದು ಯಂತ್ರವನ್ನು ಯುನೈಟೆಡ್ ಕಿಂಗ್ಡಮ್ನ RENISHAW ಕಂಪನಿಯ ಲೇಸರ್ ಇಂಟರ್ಫೆರೋಮೀಟರ್ನಿಂದ ಮಾಪನಾಂಕ ನಿರ್ಣಯಿಸಲಾಗುತ್ತದೆ, ಪಿಚ್ ದೋಷ, ಹಿಂಬಡಿತ, ಸ್ಥಾನೀಕರಣ ನಿಖರತೆ, ಪುನರಾವರ್ತಿತ ಸ್ಥಾನೀಕರಣ ನಿಖರತೆ ಇತ್ಯಾದಿಗಳನ್ನು ನಿಖರವಾಗಿ ಪರಿಶೀಲಿಸಲು ಮತ್ತು ಸರಿದೂಗಿಸಲು, ಕ್ರಿಯಾತ್ಮಕ, ಸ್ಥಿರ ಸ್ಥಿರತೆ ಮತ್ತು ಸಂಸ್ಕರಣಾ ನಿಖರತೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು. ಯಂತ್ರ . ಬಾಲ್ಬಾರ್ ತಪಾಸಣೆ ಪ್ರತಿಯೊಂದು ಯಂತ್ರವು ನಿಜವಾದ ವೃತ್ತದ ನಿಖರತೆ ಮತ್ತು ಯಂತ್ರದ ಜ್ಯಾಮಿತೀಯ ನಿಖರತೆಯನ್ನು ಮಾಪನಾಂಕ ಮಾಡಲು ಬ್ರಿಟಿಷ್ RENISHAW ಕಂಪನಿಯ ಬಾಲ್ಬಾರ್ ಅನ್ನು ಬಳಸುತ್ತದೆ ಮತ್ತು ಯಂತ್ರದ 3D ಯಂತ್ರದ ನಿಖರತೆ ಮತ್ತು ವೃತ್ತಾಕಾರದ ನಿಖರತೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಅದೇ ಸಮಯದಲ್ಲಿ ವೃತ್ತಾಕಾರದ ಕತ್ತರಿಸುವ ಪ್ರಯೋಗಗಳನ್ನು ನಡೆಸುತ್ತದೆ.


6.ಯಂತ್ರ ಉಪಕರಣ ಪರಿಸರ:
6.1. ಸಲಕರಣೆ ಬಳಕೆ ಪರಿಸರ ಅಗತ್ಯತೆಗಳು
ಸುತ್ತುವರಿದ ತಾಪಮಾನದ ಸ್ಥಿರ ಮಟ್ಟವನ್ನು ನಿರ್ವಹಿಸುವುದು ನಿಖರವಾದ ಯಂತ್ರಕ್ಕೆ ಅತ್ಯಗತ್ಯ ಅಂಶವಾಗಿದೆ.
(1) ಬಳಸಬಹುದಾದ ಸುತ್ತುವರಿದ ತಾಪಮಾನದ ಅವಶ್ಯಕತೆ -10 ℃ ~ 35 ℃, ಸುತ್ತುವರಿದ ತಾಪಮಾನವು 20 ℃ ಆಗಿದ್ದರೆ, ಆರ್ದ್ರತೆಯು 40 ~ 75% ಆಗಿರಬೇಕು.
(2) ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ವ್ಯಾಪ್ತಿಯೊಳಗೆ ಯಂತ್ರ ಉಪಕರಣದ ಸ್ಥಿರ ನಿಖರತೆಯನ್ನು ಇರಿಸಿಕೊಳ್ಳಲು, ಗರಿಷ್ಟ ಸುತ್ತುವರಿದ ತಾಪಮಾನವು 15 ° C ನಿಂದ 25 ° C, ಮತ್ತು ತಾಪಮಾನ ವ್ಯತ್ಯಾಸದ ಅಗತ್ಯವಿದೆ
±2°C/24ಗಂ ಮೀರಬಾರದು.
6.1.2. ವಿದ್ಯುತ್ ಸರಬರಾಜು ವೋಲ್ಟೇಜ್: 3 ಹಂತಗಳು, 380V, ± 10% ವೋಲ್ಟೇಜ್ ಏರಿಳಿತದ ವ್ಯಾಪ್ತಿಯಲ್ಲಿ, ವಿದ್ಯುತ್ ಸರಬರಾಜು ಆವರ್ತನ: 50HZ.
6.1.3. ಬಳಕೆಯ ಪ್ರದೇಶದಲ್ಲಿನ ವೋಲ್ಟೇಜ್ ಅಸ್ಥಿರವಾಗಿದ್ದರೆ, ಯಂತ್ರ ಉಪಕರಣದ ಸಾಮಾನ್ಯ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಯಂತ್ರ ಉಪಕರಣವು ಸ್ಥಿರವಾದ ವಿದ್ಯುತ್ ಸರಬರಾಜನ್ನು ಹೊಂದಿರಬೇಕು.
6.1.4. ಯಂತ್ರ ಉಪಕರಣವು ವಿಶ್ವಾಸಾರ್ಹ ಗ್ರೌಂಡಿಂಗ್ ಅನ್ನು ಹೊಂದಿರಬೇಕು: ಗ್ರೌಂಡಿಂಗ್ ತಂತಿಯು ತಾಮ್ರದ ತಂತಿಯಾಗಿದೆ, ತಂತಿಯ ವ್ಯಾಸವು 10mm² ಗಿಂತ ಕಡಿಮೆಯಿರಬಾರದು ಮತ್ತು ಗ್ರೌಂಡಿಂಗ್ ಪ್ರತಿರೋಧವು 4 Ω ಗಿಂತ ಕಡಿಮೆಯಿರಬೇಕು.
6.1.5. ಸಲಕರಣೆಗಳ ಸಾಮಾನ್ಯ ಕೆಲಸದ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು, ಗಾಳಿಯ ಮೂಲದ ಸಂಕುಚಿತ ಗಾಳಿಯು ಗಾಳಿಯ ಮೂಲದ ಅವಶ್ಯಕತೆಗಳನ್ನು ಪೂರೈಸಲು ಸಾಧ್ಯವಾಗದಿದ್ದರೆ, ಅದನ್ನು ಯಂತ್ರ ಉಪಕರಣದಲ್ಲಿ ಅಳವಡಿಸಬೇಕು.
ಗಾಳಿಯ ಮೊದಲು ಗಾಳಿಯ ಮೂಲ ಶುದ್ಧೀಕರಣ ಸಾಧನವನ್ನು (ಡಿಹ್ಯೂಮಿಡಿಫಿಕೇಶನ್, ಡಿಗ್ರೀಸಿಂಗ್, ಫಿಲ್ಟರಿಂಗ್) ಸೇರಿಸಿ.
6.1.6. ಯಂತ್ರೋಪಕರಣಗಳ ಉತ್ಪಾದನೆಯ ವೈಫಲ್ಯ ಅಥವಾ ಯಂತ್ರೋಪಕರಣದ ನಿಖರತೆಯ ನಷ್ಟವನ್ನು ತಪ್ಪಿಸಲು, ನೇರ ಸೂರ್ಯನ ಬೆಳಕು, ಕಂಪನ ಮತ್ತು ಶಾಖದ ಮೂಲಗಳು, ಹೆಚ್ಚಿನ ಆವರ್ತನ ಜನರೇಟರ್ಗಳು, ವಿದ್ಯುತ್ ವೆಲ್ಡಿಂಗ್ ಯಂತ್ರಗಳು ಇತ್ಯಾದಿಗಳಿಂದ ಉಪಕರಣಗಳನ್ನು ದೂರವಿಡಿ.
7. ಟಿತಾಂತ್ರಿಕ ನಿಯತಾಂಕಗಳು:
| ಮಾದರಿ | 6025-6Z | |
| ವರ್ಕ್ಪೀಸ್ ಗಾತ್ರವನ್ನು ಪ್ರಕ್ರಿಯೆಗೊಳಿಸಲಾಗುತ್ತಿದೆ | ಉದ್ದ × ಅಗಲ × ಎತ್ತರ (ಮಿಮೀ) | 6000× 2300×2300 |
| ಗ್ಯಾಂಟ್ರಿ ಗರಿಷ್ಠ ಫೀಡ್ | ಅಗಲ (ಮಿಮೀ) | 6800 |
| ಕೆಲಸದ ಮೇಜಿನ ಗಾತ್ರ | ಉದ್ದ X ಅಗಲ (ಮಿಮೀ) | 3000*1000 =4 |
| ಅಂಕಣ ಪ್ರಯಾಣ | ಕಾಲಮ್ ಹಿಂದಕ್ಕೆ ಮತ್ತು ಮುಂದಕ್ಕೆ ಸರಿಸಿ (ಮಿಮೀ) | 7000 |
| ಡಬಲ್ ರಾಮ್ ಎತ್ತುವ ಮತ್ತು ಕೆಳಗೆ | ರಾಮ್ನ ಮೇಲೆ ಮತ್ತು ಕೆಳಗೆ ಸ್ಟ್ರೋಕ್ (ಮಿಮೀ) | 2500 |
| ಸ್ಪಿಂಡಲ್ ಕೇಂದ್ರದಿಂದ ಟೇಬಲ್ ಪ್ಲೇನ್ ದೂರ | 0-2500ಮಿಮೀ | |
|
ಸಮತಲವಾದ ರಾಮ್ ಪ್ರಕಾರದ ಕೊರೆಯುವ ತಲೆ ವಿದ್ಯುತ್ ತಲೆ ಒಂದು ಎರಡು
| ಪ್ರಮಾಣ (2) | 2 |
| ಸ್ಪಿಂಡಲ್ ಟೇಪರ್ | BT50 | |
| ಕೊರೆಯುವ ವ್ಯಾಸ (ಮಿಮೀ) | Φ2-Φ60 | |
| ಟ್ಯಾಪಿಂಗ್ ವ್ಯಾಸ (ಮಿಮೀ) | M3-M30 | |
| ಸ್ಪಿಂಡಲ್ ವೇಗ (r/min) | 30~5000 | |
| ಸರ್ವೋ ಸ್ಪಿಂಡಲ್ ಮೋಟಾರ್ ಪವರ್ (kw) | 37*2 | |
| ಎರಡು ಸ್ಪಿಂಡಲ್ ತುದಿಗಳ ನಡುವಿನ ಎಡ ಮತ್ತು ಬಲ ಪ್ರಯಾಣದ ಅಂತರ | 5800-6800ಮಿಮೀ | |
| ರಾಮ್ನ ಎಡ ಮತ್ತು ಬಲ ಸ್ಟ್ರೋಕ್ (ಮಿಮೀ) | 500 | |
| ಬೈಡೈರೆಕ್ಷನಲ್ ಪೊಸಿಷನಿಂಗ್ ನಿಖರತೆ | 300mm * 300mm | ± 0.025 |
| ದ್ವಿ-ದಿಕ್ಕಿನ ಪುನರಾವರ್ತಿತ ಸ್ಥಾನೀಕರಣ ನಿಖರತೆ | 300mm * 300mm | ± 0.02 |
| ಯಂತ್ರ ಉಪಕರಣದ ಆಯಾಮಗಳು | ಉದ್ದ × ಅಗಲ × ಎತ್ತರ (ಮಿಮೀ) | ರೇಖಾಚಿತ್ರಗಳ ಪ್ರಕಾರ (ವಿನ್ಯಾಸ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಬದಲಾವಣೆಗಳಿದ್ದರೆ, ನಾವು ನಿಮಗೆ ತಿಳಿಸುತ್ತೇವೆ) |
| ಒಟ್ಟು ತೂಕ (ಟಿ) | 72T | |